01 | 空间描述与变换
10669 27 行代码 13 张图片 42
这一章主要讲的是几种表示位姿的方法
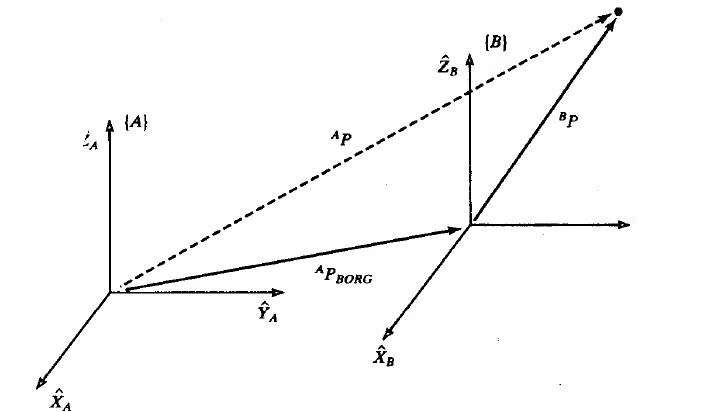
位置和姿态总是成对出现的,我们将此组合称为坐标系。一个坐标系可以等价的用一个位置向量和一个旋转矩阵来描述。
位置 :用向量进行表示,左上标来描述具体的坐标系,例如 \(^A\!P\) \(P\) \(A\) 姿态 :物体上固定坐标系相对于参考坐标系的方位
数学基础
向量点乘 向量叉乘
两个向量 \(r_{OP}\) \(r_{OQ}\) ( ) :
\[
r_{OP} \cdot r_{OQ}
= ^AP \cdot ^AQ = ^AP^T \cdot ^AQ\\
= (p_x \quad p_y \quad p_z)\begin{pmatrix}q_x\\q_y\\q_z\end{pmatrix} \\
= p_xq_x + p_yq_y + p_zq_z
\]
两个向量 \(\vec{a}\) \(\vec{b}\) \(\vec{c}\) :
\[
\vec{c} = \vec{a} \times \vec{b}= |a||b|\sin\theta
\]
方向遵循右手定则,垂直于这两个向量所在的平面。
简单计算方法 :
把 \(\vec{a}\) \(\vec{b}\)
\[
\begin{pmatrix}
a_x & a_y & a_z & a_x & a_y & a_z \\
b_x & b_y & b_z & b_x & b_y & b_z
\end{pmatrix}
\]
去掉第一列和最后一列,剩下的 3 2x2 1 ) ,计算行列式即可
我们知道空间中的变换可以表示为旋转和平移的组合,那么如何表示旋转和平移呢?
向量加法 -
\[
^A\!P = ^B\!P + ^A\!P_{BORG}
\]
点本身没有移动,只是随着观察的参考系不同,其坐标表示也不同
旋转矩阵 -
旋转矩阵
把新坐标系下的单位向量用旧坐标系下的单位向量表示
\(^A_B\!R\) A B
\[
^A_BR = \begin{bmatrix} ^A\!X_B & ^A\!Y_B & ^A\!Z_B \end{bmatrix} = \begin{bmatrix} r_{11} & r_{12} & r_{13} \\ r_{21} & r_{22} & r_{23} \\ r_{31} & r_{32} & r_{33} \end{bmatrix}
\]
性质
旋转矩阵是正交矩阵,即 \(^A_B\!R^T = ^A_B\!R^{-1} = ^B_A\!R\)
旋转矩阵的行列式为 1 \(\det(^A_B\!R) = 1\)
证明 \(\det(^A_B\!R) = 1\)
由正交性即可得出 \(R^T \cdot R = I\) ,
SO3 :Special Orthogonal Group 三维特殊正交群
\[
SO(3) = \left\{
\begin{pmatrix}
r_{11} & r_{12} & r_{13} \\
r_{21} & r_{22} & r_{23} \\
r_{31} & r_{32} & r_{33}
\end{pmatrix}
\in \mathbb{R}^{3 \times 3} \mid
\begin{pmatrix}
r_{11} \\
r_{21} \\
r_{31}
\end{pmatrix}^T
\begin{pmatrix}
r_{11} \\
r_{21} \\
r_{31}
\end{pmatrix} = 1,
\begin{pmatrix}
r_{12} \\
r_{22} \\
r_{32}
\end{pmatrix}^T
\begin{pmatrix}
r_{12} \\
r_{22} \\
r_{32}
\end{pmatrix} = 1,
\begin{pmatrix}
r_{11} \\
r_{21} \\
r_{31}
\end{pmatrix}^T
\begin{pmatrix}
r_{12} \\
r_{22} \\
r_{32}
\end{pmatrix} = 0,
\begin{pmatrix}
r_{11} \\
r_{21} \\
r_{31}
\end{pmatrix}^T
\begin{pmatrix}
r_{13} \\
r_{23} \\
r_{33}
\end{pmatrix} = 0,
\begin{pmatrix}
r_{12} \\
r_{22} \\
r_{32}
\end{pmatrix}^T
\begin{pmatrix}
r_{13} \\
r_{23} \\
r_{33}
\end{pmatrix} = 0
\right\}
\]
群
群 \((G, *)\) \(G\) \(*\)
封闭性(Closure) :对于任意 \(a, b \in G\) \(a * b \in G\) 结合性(Associativity) :对于任意 \(a, b, c \in G\) \((a * b) * c = a * (b * c)\) 单位元(Identity Element) :存在一个元素 \(e \in G\) \(a \in G\) \(a * e = e * a = a\) 逆元(Inverse Element) :对于任意 \(a \in G\) \(b \in G\) \(a * b = b * a = e\) \(e\)
SO(3) 是全体旋转矩阵的集合 , \(SO(3)\) 旋转前后,2 范数不变 :\(\|y\|^2 = y^T y = (Rx)^T Rx = x^T R^T R x = x^T x = \|x\|^2\)
空间中确定一个旋转至少需要 3
SO(3) 群有 6 1) ,两个单位向量正交,叉乘得到第三个单位向量
所以自由度是 3
因为固定角 / 3 3 个参数) ,所以又称之为最小表示运动学方程
表示旋转 :源坐标系下的向量使用基向量以及坐标表示的,如果要转到目标坐标系下,那么就需要把基向量用目标坐标系的基向量表示(旋转矩阵)
\[
\begin{equation}
{}^A\!P = {}^A_B\!R \,{}^B\!P
\end{equation}
\]
记忆法则:消消乐,前面的矩阵的下标 \(A\) \(A\)
齐次变换矩阵 - +
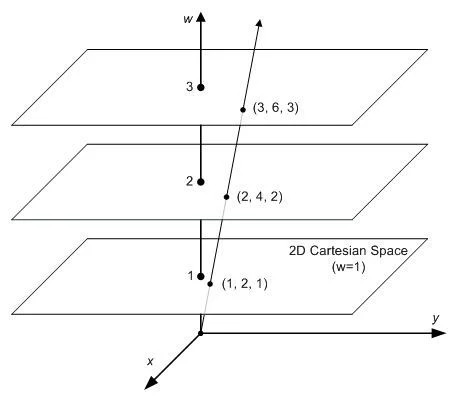
齐次坐标
没有什么问题是增加一个维度解决不了的,如果有,那就加二个
motivation: 欧氏空间可以很好描述 2D/3D ( )
齐次坐标 : 增加额外变量 \(W\) \(n+1\) \(n\) , W
任何 \(N\) \(W\) 0 \(W\) \(W=1\) , \(N-1\) ( 也就是在 \(W=1\) )
而当 \(W=0\) x \(N-1\)
无穷远 : 齐次坐标系统中可以用 \(W=0\) \((x,y,0)\)
将平移变换和旋转变换结合起来,应该怎么表示呢?
先在 B A
\[
^A\!P = {}^A_B\!R \,{}^B\!P + {}^A\!P_{B}
\]
写成矩阵的形式
\[
\begin{bmatrix}
^AP \\
1
\end{bmatrix}=
\begin{bmatrix}
\begin{array}{c|c}
^AR & P_{B} \\ \hline
0 & 1
\end{array}
\end{bmatrix}
\begin{bmatrix}
^BP \\
1
\end{bmatrix}
\]
\[
^A\!P = {}^A_B\!T \,{}^B\!P
\]
其中,齐次变换矩阵
\[
^A_B\!T = \begin{bmatrix} ^A_B\!R & ^A\!P_B \\ 0 & 1 \end{bmatrix} \in \mathbb{R}^{4 \times 4}
\]
SE(3):Special Euclidean Group in 3 dimensions
\[
SE(3) = \left\{
\begin{bmatrix} ^A_B\!R & ^A\!P_B \\ 0 & 1 \end{bmatrix} \middle| ^A_B\!R \in SO(3), ^A\!P_B \in \mathbb{R}^3
\right\}
\]
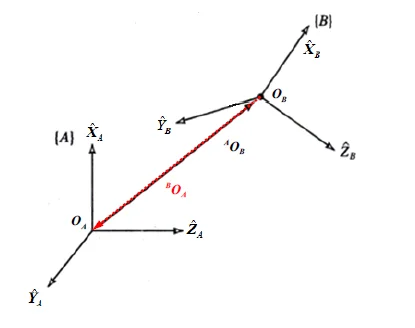
刚体的不同位姿与 \(SE(3)\)
经旋转和平移后的齐次变换矩阵 与一个坐标系相对于参考坐标系经旋转和平移后的齐次变换矩阵是相同的。
\[
\begin{align}
^A_B\!T &=
\begin{bmatrix}
\begin{array}{c|c}
^A_B\!R & ^A\!O_B \\ \hline
0 & 1
\end{array}
\end{bmatrix}
\\
^B_A\!T &=
\begin{bmatrix}
\begin{array}{c|c}
^B_A\!R & ^B\!O_A \\ \hline
0 & 1
\end{array}
\end{bmatrix} =
\begin{bmatrix}
\begin{array}{c|c}
^B_A\!R & -^B_A\!R \cdot ^A\!O_B \\ \hline
0 & 1
\end{array}
\end{bmatrix}
\end{align}
\]
\[
^A_B\!T \cdot ^B_A\!T = I
\]
证明:绕一个轴旋转再沿着这个轴平移等价于先沿着这个轴平移再绕着这个轴旋转
设绕轴 \(\mathbf{k}=(k_x, k_y, k_z)^T\) \(\theta\) \(R\) \(d\) \(\mathbf{t} = d\mathbf{k}\)
情况 1
先进行旋转操作,再进行平移操作,对应的齐次变换矩阵 \(T_1\) \(T_1 = \begin{bmatrix}R & \mathbf{t} \\\mathbf{0}^T & 1\end{bmatrix}=\begin{bmatrix}R & d\mathbf{k} \\\mathbf{0}^T & 1\end{bmatrix}\)
情况 2
先进行平移操作,再进行旋转操作,对应的齐次变换矩阵 \(T_2\) \(T_2 =\begin{bmatrix}R & R\mathbf{t} \\\mathbf{0}^T & 1\end{bmatrix}=\begin{bmatrix}R & Rd\mathbf{k} \\\mathbf{0}^T & 1\end{bmatrix}\)
由于旋转是绕着轴 \(\mathbf{k}\) \(\mathbf{k}\) \(R\mathbf{k}=\mathbf{k}\)
所以,\(T_2\) \(Rd\mathbf{k} = d\mathbf{k}\) \(T_1 = T_2\) ,即绕一个轴旋转再沿着这个轴平移等价于先沿着这个轴平移再绕着这个轴旋转。
欧拉角 -
通过将三个基本旋转(Roll, Pitch, Yaw)按特定顺序组合来表示任意的旋转。
正方向 :按照右手螺旋确定
记忆方法
首先旋转轴必有一个 1\(\cos\) 一定在主对角线\(\sin\) 的符号不同y的负号在左下角,xz的负号在右上角
桶滚 roll 俯仰 pitch 偏摆 yaw
x 轴不变,滚动(Roll) 的旋转矩阵:
\[
\begin{bmatrix}
1 & 0 & 0 \\
0 & \cos\phi & -\sin\phi \\
0 & \sin\phi & \cos\phi
\end{bmatrix}
\]
y 轴不变,俯仰(Pitch) 的旋转矩阵:
\[
\begin{bmatrix}
\cos\theta & 0 & \sin\theta \\
0 & 1 & 0 \\
-\sin\theta & 0 & \cos\theta
\end{bmatrix}
\]
z 轴不变,偏摆(Yaw)的旋转矩阵:
\[
\begin{bmatrix}
\cos\psi & -\sin\psi & 0 \\
\sin\psi & \cos\psi & 0 \\
0 & 0 & 1
\end{bmatrix}
\]
其中,\(\phi\) \(\theta\) \(\psi\) X Y 轴和 Z
z-y-x 欧拉角 :
\[
\begin{align}
R_{z,y,x}(\alpha,\beta,\gamma) &= \begin{pmatrix}
\cos\alpha & -\sin\alpha & 0 \\
\sin\alpha & \cos\alpha & 0 \\
0 & 0 & 1
\end{pmatrix}
\begin{pmatrix}
\cos\beta & 0 & \sin\beta \\
0 & 1 & 0 \\
-\sin\beta & 0 & \cos\beta
\end{pmatrix}
\begin{pmatrix}
1 & 0 & 0 \\
0 & \cos\gamma & -\sin\gamma \\
0 & \sin\gamma & \cos\gamma
\end{pmatrix} \\
&= \begin{pmatrix}
\cos\alpha\cos\beta & \cos\alpha\sin\beta\sin\gamma-\sin\alpha\cos\gamma & \cos\alpha\sin\beta\cos\gamma+\sin\alpha\sin\gamma \\
\sin\alpha\cos\beta & \sin\alpha\sin\beta\sin\gamma+\cos\alpha\cos\gamma & \sin\alpha\sin\beta\cos\gamma-\cos\alpha\sin\gamma \\
-\sin\beta & \cos\beta\sin\gamma & \cos\beta\cos\gamma
\end{pmatrix}
\end{align}
\]
\(\forall R \in SO(3)\) \(R_{z,y,x}(\alpha, \beta, \gamma)\)
万向节死锁(Gimbal Lock)
非对称型欧拉角:
中间的旋转角在 \(\left[ -\frac{\pi}{2}, \frac{\pi}{2}\right]\)
如果不在 \(\left[ -\frac{\pi}{2}, \frac{\pi}{2}\right]\)
对称型欧拉角
当 \(0 < \beta < \pi\)
若 \(\beta = 0\) \(\beta = \pi\) \(a + \gamma\) \(\alpha - \gamma\)
直观理解:
欧拉角描述的不是转动过程 ,而是一个变换 ,只记录结果,不记录过程
欧拉角描述相对于初始状态的变换,只和最终状态有关,与过程无关。 (外边的轴转动会带动里面的轴转动)
例子
比如这个 xyz x-y-z, y 90
物体将先绕 x x) ,再绕 y 90 z z x ) 。
所以理解的关键是要明白,欧拉角描述的是一个变换 ,而不是一个连续的转动过程。后面的变换使用的是前面变换的坐标系。
\[
\begin{align}
\mathbf{R_z}(\theta) \mathbf{R_y}(\frac{\pi}{2}) \mathbf{R_x}(\alpha)
&= \begin{bmatrix}
0 & \cos(\theta) \cdot \sin(\alpha) - \cos(\alpha) \cdot \sin(\theta) & \sin(\alpha) \cdot \sin(\theta) + \cos(\alpha) \cdot \cos(\theta) \\
0 & \sin(\alpha) \cdot \sin(\theta) + \cos(\alpha) \cdot \cos(\theta) & \cos(\alpha) \cdot \sin(\theta) - \cos(\theta) \cdot \sin(\alpha) \\
-1 & 0 & 0
\end{bmatrix}\\
&= \begin{bmatrix}
0 & \sin(\alpha - \theta) & \cos(\alpha - \theta) \\
0 & \cos(\alpha - \theta) & -\sin(\alpha - \theta) \\
-1 & 0 & 0
\end{bmatrix}\\
&= \mathbf{R_y}(\frac{\pi}{2}) \mathbf{R_x}(\alpha - \theta)
\end{align}
\]
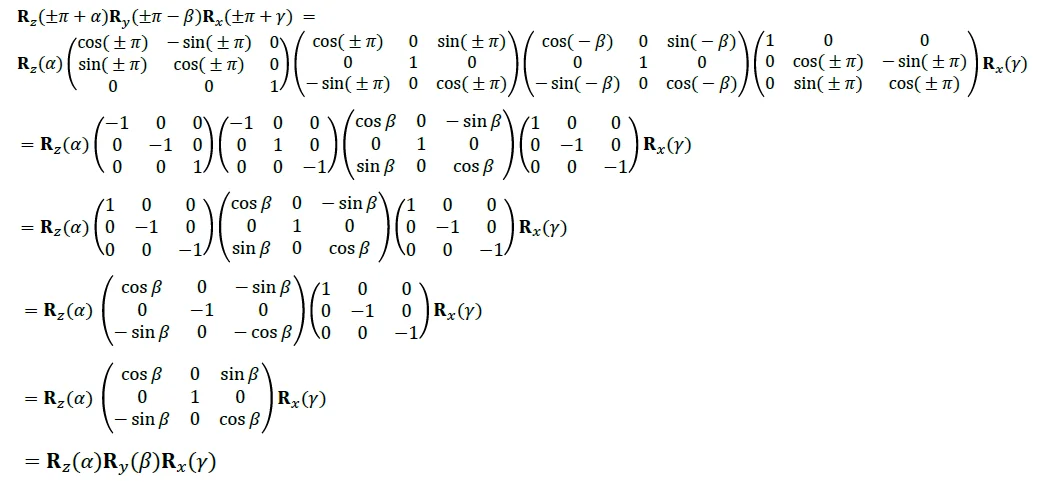
命题 \(R_z(\pm \pi + \alpha) R_y(\pm \pi - \beta) R_x(\pm \pi + \gamma) = R_z(\alpha) R_y(\beta) R_x(\gamma)\)
证明
定义集合 记集合:
\[
\mathbb{Q} = \left( -\pi, -\frac{\pi}{2} \right] \cup \left[ \frac{\pi}{2}, \pi \right]
\]
定义函数
令函数 \(f: \mathbb{Q} \to \left[ -\frac{\pi}{2}, \frac{\pi}{2} \right]\)
\[
f(\beta) =
\begin{cases}
-\pi - \beta, & \text{当 } \beta \in \left( -\pi, -\frac{\pi}{2} \right) \\
\pi - \beta, & \text{当 } \beta \in \left[ \frac{\pi}{2}, \pi \right]
\end{cases}
\]
以及函数 \(g: (-\pi, \pi] \to (-\pi, \pi]\)
\[
g(\alpha) =
\begin{cases}
\pi + \alpha, & \text{当 } \alpha \in (-\pi, 0] \\
-\pi + \alpha, & \text{当 } \alpha \in (0, \pi]
\end{cases}
\]
命题 \((\alpha, \beta, \gamma) \in (-\pi, \pi] \times \mathbb{Q} \times (-\pi, \pi]\) ,有:
\[
R_z(g(\alpha)) R_y(f(\beta)) R_x(g(\gamma)) = R_z(\alpha) R_y(\beta) R_x(\gamma)
\]
且 \((g(\alpha), f(\beta), g(\gamma)) \in (-\pi, \pi] \times \left[ -\frac{\pi}{2}, \frac{\pi}{2} \right] \times (-\pi, \pi]\)
一个姿态若能被一组俯仰角绝对值大于 90° z-y-x x-y-z 90° z-y-x x-y-z
所以规定:\((\alpha, \beta, \gamma) \in (-\pi, \pi] \times \left[-\frac{\pi}{2}, \frac{\pi}{2}\right] \times (-\pi, \pi]\)
同理,zyz 俯仰角也可以确定 \(\beta\) \([-\pi,\pi]\)
定义集合与映射函数 : 令集合 \(\mathbb{Q} = (-\pi, 0)\) β , \(f: \mathbb{Q} \to (0, \pi)\) β \(f(\beta) = -\beta.\) , \(g: (-\pi, \pi] \to (-\pi, \pi]\) z
\[
g(\theta) =
\begin{cases}
\theta + \pi, & \text{当 } \theta \in (-\pi, 0], \\
\theta - \pi, & \text{当 } \theta \in (0, \pi].
\end{cases}
\]
旋转矩阵的等价性 对于任意 \(\beta \in \mathbb{Q}\) \(\beta \in (-\pi, 0)\) ) ,通过以下步骤调整参数:令 \(\beta' = f(\beta) = -\beta \in (0, \pi)\) , \(\alpha' = g(\alpha)\) \(\gamma' = g(\gamma)\) ,
\[
R_z(\alpha') R_y(\beta') R_z(\gamma') = R_z(g(\alpha)) R_y(-\beta) R_z(g(\gamma)).
\]
根据旋转矩阵的恒等式(\(R_z(\pi) R_y(-\beta) R_z(\pi) = R_y(\beta)\) ) ,可得:\(R_z(g(\alpha)) R_y(-\beta) R_z(g(\gamma)) = R_z(\alpha) R_y(\beta) R_z(\gamma).\)
举一反三
在论证 Z-Y-X \(\beta\) \([-\pi/2,\pi/2]\)
\[
R_z(\pm\pi+\alpha)R_y(\pm\pi-\beta)R_x(\pm\pi+\gamma)=R_z(\alpha)R_y(\beta)R_x(\gamma)
\]
其实,也可论证 Z-Y-Z \(\beta\) \([0,\pi]\)
解:
\[
R_z(\pm\pi+\alpha)R_y(-\beta)R_z(\pm\pi+\gamma)=R_z(\alpha)R_y(\beta)R_z(\gamma)
\]
\[
\begin{aligned}
R_{z}(\pm\pi+\alpha)R_{y}(-\beta)R_{z}(\pm\pi+\gamma)&=\begin{bmatrix}\cos(\pm\pi+\alpha)&-\sin(\pm\pi+\alpha)&0\\\sin(\pm\pi+\alpha)&\cos(\pm\pi+\alpha)&0\\0&0&1\end{bmatrix}\begin{bmatrix}\cos(-\beta)&0&\sin(-\beta)\\0&1&0\\-\sin(-\beta)&0&\cos(-\beta)\end{bmatrix}\begin{bmatrix}\cos(\pm\pi+\gamma)&-\sin(\pm\pi+\gamma)&0\\\sin(\pm\pi+\gamma)&\cos(\pm\pi+\gamma)&0\\0&0&1\end{bmatrix}\\&=\begin{bmatrix}-\cos\alpha&\sin\alpha&0\\-\sin\alpha&-\cos\alpha&0\\0&0&1\end{bmatrix}\begin{bmatrix}\cos\beta&0&-\sin\beta\\0&1&0\\-\sin\beta&0&\cos\beta\end{bmatrix}\begin{bmatrix}-\cos\gamma&\sin\gamma&0\\-\sin\gamma&-\cos\gamma&0\\0&0&1\end{bmatrix}\\&=\begin{bmatrix}\cos\alpha&-\sin\alpha&0\\\sin\alpha&\cos\alpha&0\\0&0&1\end{bmatrix}\begin{bmatrix}\cos\beta&0&\sin\beta\\0&1&0\\-\sin\beta&0&\cos\beta\end{bmatrix}\begin{bmatrix}\cos\gamma&-\sin\gamma&0\\\sin\gamma&\cos\gamma&0\\0&0&1\end{bmatrix}\\&=R_{z}(\alpha)R_{y}(\beta)R_{z}(\gamma)
\end{aligned}
\]
等效轴角 -
欧拉旋转定理
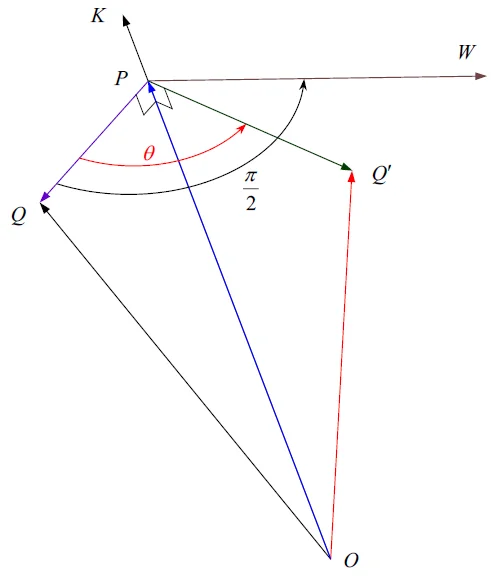
若刚体从初姿态作任意定点转动后呈终姿态,则必可找到一个过该点的轴 \(K\) \(\theta\) \(K\) \(\theta\)
罗德里格斯公式 -
\[
r_{OQ}' = r_{OQ} \cos \theta + (r_{OQ} \cdot r_{OK}) r_{OK} (1 - \cos \theta) + (r_{OK} \times r_{OQ}) \sin \theta
\]
其中 \(r_{OQ}'\) \(r_{OQ}\) 是初始点,\(r_{OK}\) 是旋转轴上的单位向量,\(\theta\) 是旋转角度
旋转矩阵求解
\[
R= \begin{pmatrix}k_x^2 \nu \theta + c \theta & k_x k_y \nu \theta - k_z s \theta & k_x k_z \nu \theta + k_y s \theta \\ k_x k_y \nu \theta + k_z s \theta & k_y^2 \nu \theta + c \theta & k_y k_z \nu \theta - k_x s \theta \\ k_x k_z \nu \theta - k_y s \theta & k_y k_z \nu \theta + k_x s \theta & k_z^2 \nu \theta + c \theta\end{pmatrix}
\]
其中 \(\nu \theta = 1-\cos \theta\)
矩阵形式 :两种等价表达
\[
\begin{align*}
R &= I + \sin(\theta)N + (1 - \cos(\theta))N^2\\
R &= \cos(\theta)\ast I + (1-\cos(\theta)) \ast n \ast n^T + \sin(\theta) \ast n
\end{align*}
\]
其中 , \(n = \begin{pmatrix}n_x \\ n_y \\ n_z\end{pmatrix}\) \(N\)
\[
N = \begin{bmatrix}
0 & -n_z & n_y \\
n_z & 0 & -n_x \\
-n_y & n_x & 0
\end{bmatrix}
\]
参考文献:罗德里格斯公式附图推导,理解 -CSDN
性质
旋转 \(\theta\) \(\theta+2k\pi\)
\((n^\wedge, \theta) = (-n^\wedge, -\theta)\) 对于非常小的角度:\(R(\omega, \theta) \approx I+\sin(\theta)\ast N \approx I+\theta\ast N = \begin{bmatrix}
1 & -\omega_z & \omega_y \\
\omega_z & 1 & \omega_x \\
-\omega_y & \omega_x & 1
\end{bmatrix}\)
证明
可行性验证——罗德里格斯公式推导
以单位向量 \(^A\!K=(k_x,k_y,k_z)^\mathrm{T}\) \(\theta\)
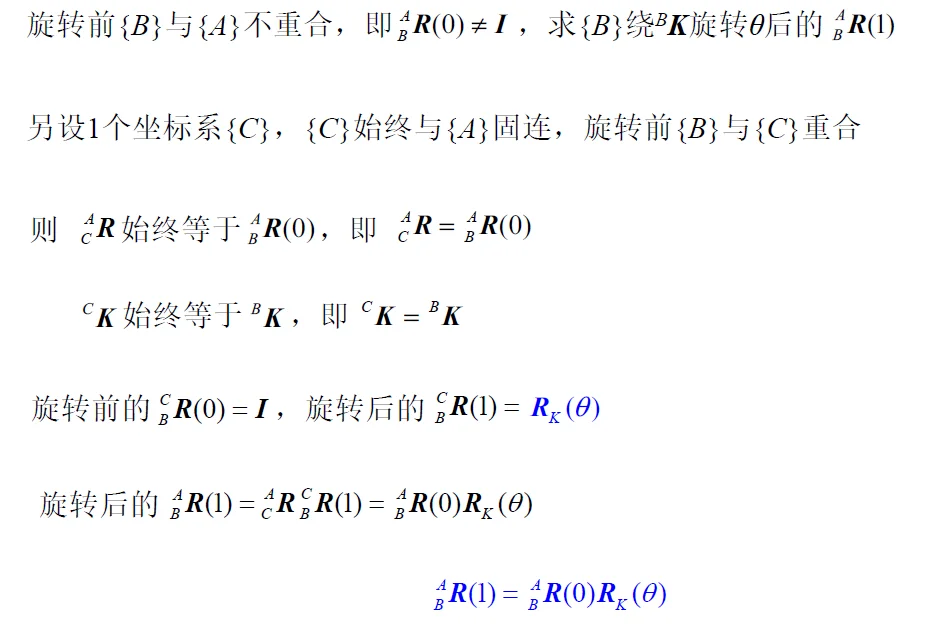
旋转前 \(\{B\}\) \(\{A\}\) \(^A_B\!R(0)=\mathbf{I}\) \(\{B\}\) \(^A\!K\) \(\theta\) \(^A_{B(1)}\!R\)
即分别求 \(^{A}\mathbf{X}_{B(0)}=\begin{pmatrix}1\\0\\0\end{pmatrix}\) \(^{A}\mathbf{Y}_{B(0)}=\begin{pmatrix}0\\1\\0\end{pmatrix}\) ,\(^{A}\mathbf{Z}_{B(0)}=\begin{pmatrix}0\\0\\1\end{pmatrix}\) \(^A\!K\) \(\theta\) \(^{A}\mathbf{X}_{B(1)}\) \(^{A}\mathbf{Y}_{B(1)}\) ,\(^{A}\mathbf{Z}_{B(1)}\)
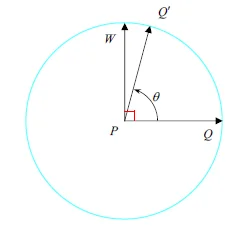
向量 \(\mathbf{r}_{OQ}\) \(\mathbf{r}_{OK}\) \(\mathbf{r}_{OQ}\) \(\mathbf{r}_{OK}\) \(\mathbf{r}_{OQ}\) \(\mathbf{r}_{Ox}\) \(\mathbf{r}_{OP} = (\mathbf{r}_{OQ} \cdot \mathbf{r}_{Ox}) \mathbf{r}_{Ox}\) (点乘获得长度,乘以单位向量获得方向) ,则 \(\mathbf{r}_{PQ} = \mathbf{r}_{OQ} - \mathbf{r}_{OP}\)
将直角三角形 \(OPQ\) \(\mathbf{r}_{Ox}\) \(\theta\) \(OP'Q'\) \(\mathbf{r}_{OQ'}\) \(\mathbf{r}_{OQ}\) \(\mathbf{r}_{OQ'}\) \(\mathbf{r}_{PW} = \mathbf{r}_{Ox} \times \mathbf{r}_{PQ}\) \(\mathbf{r}_{PQ}\) \(\mathbf{r}_{Ox}\) \(90^\circ\) \(\mathbf{r}_{PW}\)
\[
\mathbf{r}_{PW} \perp \mathbf{r}_{Ox}, \mathbf{r}_{PW} \perp \mathbf{r}_{PQ}, |\mathbf{r}_{PW}| = |\mathbf{r}_{Ox}| |\mathbf{r}_{PQ}| \sin \frac{\pi}{2} = |\mathbf{r}_{PQ}| = |\mathbf{r}_{PW}|
\]
显然,点 \(P, Q, W, Q'\) \(P\) \(|\mathbf{r}_{PQ}|\) \(Q, W, Q'\) \(\mathbf{r}_{PQ'} = \mathbf{r}_{PQ} \cos \theta + \mathbf{r}_{PW} \sin \theta\) (可以理解为正交分解,乘上了对应方向的单位向量)
于是 \(\mathbf{r}_{OQ'} = \mathbf{r}_{OP} + \mathbf{r}_{PQ'} = \mathbf{r}_{OP} + (\mathbf{r}_{OQ} - \mathbf{r}_{OP}) \cos \theta + (\mathbf{r}_{OK} \times \mathbf{r}_{OQ}) \sin \theta - (\mathbf{r}_{OK} \times \mathbf{r}_{OP}) \sin \theta\)
\(\mathbf{r}_{OK}\) \(\mathbf{r}_{OP}\) 0
证明方法:利用极限的思想推导
叫做 exponential twist(Murray, Li, and Sastry 1994) \(\theta\) k \(\theta/k\)
\[
R(n^\wedge, \theta) = \lim_{k \to \infty} \left(I + \frac{1}{k} (\theta \ast N)\right)^k = e^{\theta \ast N}
\]
\[
e^{\theta \ast N} = I + (\theta \ast N) + \frac{(\theta \ast N)^2}{2} + \frac{(\theta \ast N)^3}{3!} + ...
\]
因为 \(n\) \(N^2 = -I\)
\[
N^{k+2} = -N^k, k > 0
\]
所以
\[
\begin{align*}
e^{\theta \ast N} &= I + (\theta - \frac{\theta^3}{3!} + ...) \ast N + (\frac{\theta^2}{2} - \frac{\theta^4}{4!} + ...) \ast N^2\\
&= I + sin\theta \ast N + (1 - cos\theta) \ast N^2
\end{align*}
\]
证明两个无穷小旋转次序可以交换
使用了 \(\sin\theta \approx \theta\) \(\cos\theta \approx 1\) ,以及 \(\theta^2 \approx 0\)
\[
\begin{align*}
\mathbf{R}_K(\theta) = \begin{pmatrix}
k_x^2 \upsilon \theta + c \theta & k_x k_y \upsilon \theta - k_z s \theta & k_x k_z \upsilon \theta + k_y s \theta \\
k_x k_y \upsilon \theta + k_z s \theta & k_y^2 \upsilon \theta + c \theta & k_y k_z \upsilon \theta - k_x s \theta \\
k_x k_z \upsilon \theta - k_y s \theta & k_y k_z \upsilon \theta + k_x s \theta & k_z^2 \upsilon \theta + c \theta
\end{pmatrix}
\end{align*}
\]
代码实现
罗德里格斯公式 function R = rotation_vector_to_matrix(k)
% 这个函数实现了罗德里格斯公式,将旋转向量转换为旋转矩阵
% 输入k是旋转向量,包含了旋转轴方向和旋转角度(角度在向量的模长中)
% 1. 计算旋转角度theta(弧度),即旋转向量的模长
theta = norm(k);
% 2. 如果旋转角度为0,直接返回单位矩阵(不旋转)
if theta == 0
R = eye(3);
return;
end
% 3. 计算单位旋转轴向量ne
ne = k/theta; % 归一化得到单位向量
% 4. 构造ne的叉积矩阵K,用于后续计算
% K = [ne]_× 是ne的叉积矩阵,满足K*v = ne × v
K = [0,-ne(3),ne(2);
ne(3),0,-ne(1);
-ne(2),ne(1),0];
% 5. 使用罗德里格斯公式计算旋转矩阵
% R = I + sin(θ)[k]_× + (1-cos(θ))[k]_×^2
% 其中I是单位矩阵,[k]_×是叉积矩阵,θ是旋转角度
R = eye(3) + sin(theta)*K + (1-cos(theta))*(K*K);
end
四元数
欧拉参数
在等效轴 \([k_x \, k_y \, k_z]^T\) \(\theta \in \mathbb{R}\) \([\eta \,\ \varepsilon_1 \ \varepsilon_2 \ \varepsilon_3]^T\) , 1
其中
\[
\eta = \cos \frac{\theta}{2}, \quad \varepsilon = \begin{bmatrix} \varepsilon_1 \\ \varepsilon_2 \\ \varepsilon_3 \end{bmatrix} = \begin{bmatrix} k_x \sin \frac{\theta}{2} \\ k_y \sin \frac{\theta}{2} \\ k_z \sin \frac{\theta}{2} \end{bmatrix}
\]
满足约束 \(\eta^2 + \varepsilon_1^2 + \varepsilon_2^2 + \varepsilon_3^2 = 1\)
记 \(\mathbb{U}\) , \(\mathbb{U}\) \(\mathbb{R}^4\)
将之前的等效轴角表示写成欧拉参数的形式
\[
R = \begin{bmatrix}
k_x^2 \nu \theta + c \theta & k_x k_y \nu \theta - k_z s \theta & k_x k_z \nu \theta + k_y s \theta \\
k_x k_y \nu \theta + k_z s \theta & k_y^2 \nu \theta + c \theta & k_y k_z \nu \theta - k_x s \theta \\
k_x k_z \nu \theta - k_y s \theta & k_y k_z \nu \theta + k_x s \theta & k_z^2 \nu \theta + c \theta
\end{bmatrix}\\
= \begin{bmatrix}
2(\eta^2 + \varepsilon_1^2) - 1 & 2(\varepsilon_1 \varepsilon_2 - \eta \varepsilon_3) & 2(\varepsilon_1 \varepsilon_3 + \eta \varepsilon_2) \\
2(\varepsilon_1 \varepsilon_2 + \eta \varepsilon_3) & 2(\eta^2 + \varepsilon_2^2) - 1 & 2(\varepsilon_2 \varepsilon_3 - \eta \varepsilon_1) \\
2(\varepsilon_1 \varepsilon_3 - \eta \varepsilon_2) & 2(\varepsilon_2 \varepsilon_3 + \eta \varepsilon_1) & 2(\eta^2 + \varepsilon_3^2) - 1
\end{bmatrix} = R_\varepsilon(\eta)
\]
其中,\(\nu \theta = 1 - c \theta\) ,\(c = \cos \theta\) ,\(s = \sin \theta\) 。
任给一组欧拉参数,必有一个姿态(或旋转)与之对应。
四元数基础
哈密顿与四元数
哈密顿在 1843
四元数是一种扩展了复数的数学对象,由一个实部和三个虚部组成
引入三个虚数单位 \(i, j, k\) \(i^2 = j^2 = k^2 = ijk = -1\)
由此规定,可推导得:
\[
ij = k, ji = -k, jk = i, kj = -i, ki = j, ik = -j
\]
\(ij = k\) ijk = -1 等式左右同时右乘 k\(ji = -k\) 推导过程: ijk = -1等式左右同时右乘kj, 得 \(i = -jk\) ,得证
对任意 \([\eta \,\ \varepsilon_1 \,\ \varepsilon_2 \,\ \varepsilon_3]^T \in \mathbb{R}^4\) \(q\)
\[
q = \eta + i\varepsilon_1 + j\varepsilon_2 + k\varepsilon_3
\]
记 \(\mathbb{H}\)
四元数乘法不满足交换律
\(S^3\) \(\mathbb{H}\) 实部为 0 \(\mathbb{P}\) \(\mathbb{H}\)
\(\mathbb{P}\)
Grassmann 积在欧拉参数中定义 \(\eta\) \(\varepsilon\) Grassmann :
\[
\begin{bmatrix}
\eta \\
\varepsilon
\end{bmatrix} \oplus \begin{bmatrix}
\xi \\
\delta
\end{bmatrix} = \begin{bmatrix}
\eta\xi - \varepsilon^T\delta \\
\eta\delta +\xi\varepsilon + \varepsilon \times \delta
\end{bmatrix} = \begin{bmatrix}
\eta & -\varepsilon_1 & -\varepsilon_2 & -\varepsilon_3 \\
\varepsilon_1 & \eta & -\varepsilon_3 & \varepsilon_2 \\
\varepsilon_2 & \varepsilon_3 & \eta & -\varepsilon_1 \\
\varepsilon_3 & -\varepsilon_2 & \varepsilon_1 & \eta
\end{bmatrix} \begin{bmatrix}
\xi \\
\delta_1 \\
\delta_2 \\
\delta_3
\end{bmatrix} = A\begin{bmatrix}
\xi \\
\delta
\end{bmatrix}
\]
基于 Grassmann \(\mathbb{U}\) 3 3
两个欧拉参数做 grassman \(\mathbb{U}\) Grassmann \(SO(3)\) 。 (与之前表示方法兼容)
\(\mathbb{U}\) Grassmann \(\mathbb{U}\)
如果有 \(\begin{bmatrix}\eta \\ \varepsilon\end{bmatrix} \in \mathbb{U}\) \(A^TA = I\)
如果还有 \(\begin{bmatrix}\xi \\ \delta\end{bmatrix} \in \mathbb{U}\) \([\xi \quad \delta^T]A^TA\begin{bmatrix}\xi \\ \delta\end{bmatrix} = 1\) \(\begin{bmatrix}\eta\xi - \varepsilon^T\delta \\ \xi\varepsilon + \eta\delta + \varepsilon \times \delta\end{bmatrix} \in \mathbb{U}\)
单位四元数
定义 :单位四元数是模长等于 1 关系 :单位四元数与欧拉参数一一对应。
单位四元数的乘积仍然是单位四元数 单位四元数表示采用带一个约束的 4
证明
方法 1 方法 2
使用 Grassmann \(\mathbb{U}\) Grassmann \(\mathbb{U}\)
设 \(p\) \(q\)
\[
|pq| = \sqrt{(pq)(pq)^*}
\]
由于 \(p\) \(q\) \(|p| = 1 \quad \text{且} \quad |q| = 1\)
根据四元数的共轭性质,我们有:
\[
(pq)^* = q^* p^*
\]
\[
|pq| = \sqrt{(pq)(q^* p^*)} = \sqrt{pqq^* p^*} = \sqrt{pp^*} =1
\]
所以,两个单位四元数的乘积 \(pq\) 1 \(pq\)
单位四元数的逆是其共轭 ,即 \((\eta + i\varepsilon_1 + j\varepsilon_2 + k\varepsilon_3)(\eta + i\varepsilon_1 + j\varepsilon_2 + k\varepsilon_3)^* = (\eta + i\varepsilon_1 + j\varepsilon_2 + k\varepsilon_3)^*(\eta + i\varepsilon_1 + j\varepsilon_2 + k\varepsilon_3) = 1\)
证明思路:按照乘法的公式进行分解,就可以发现 i,j,k 1
兼容性
旋转矩阵基于欧拉参数表示为:
\[
A_B^B R = R_\varepsilon(\eta) = \begin{bmatrix}
2(\eta^2 + \varepsilon_1^2) - 1 & 2(\varepsilon_1 \varepsilon_2 - \eta \varepsilon_3) & 2(\varepsilon_1 \varepsilon_3 + \eta \varepsilon_2) \\
2(\varepsilon_1 \varepsilon_2 + \eta \varepsilon_3) & 2(\eta^2 + \varepsilon_2^2) - 1 & 2(\varepsilon_2 \varepsilon_3 - \eta \varepsilon_1) \\
2(\varepsilon_1 \varepsilon_3 - \eta \varepsilon_2) & 2(\varepsilon_2 \varepsilon_3 + \eta \varepsilon_1) & 2(\eta^2 + \varepsilon_3^2) - 1
\end{bmatrix}
\]
上述三维向量的转换公式可基于单位四元数表示为:
\[
ix_2 + jy_2 + kz_2 = (\eta + i\varepsilon_1 + j\varepsilon_2 + k\varepsilon_3)(ix_1 + jy_1 + kz_1)(\eta + i\varepsilon_1 + j\varepsilon_2 + k\varepsilon_3)^*
\]
如何旋转
\[
P' = qPq^{-1}
\]
表示四元数的旋转
证明过程可以参考 :四元数和旋转 (Quaternion & rotation) -
可视化
Left or Right —— 右乘连体左乘基
对于两个变换的叠加:\(M_2M_1\) \(M_1\) \(M_2\) \(M_1\) \(M_2\)
如果 \(M_2\) \(M_1\) \(M_2\) \(M_1M_2M_1^{-1}\)
那么两个变换叠加就是:\((M_1M_2M_1^{-1})M_1 = M_1M_2\)
这是一个很有意思的现象,如果每个变换都是在上个变换基础上进行的,那么只要把矩阵顺序反过来即可:
所有变换都在自然基下:\(M_4M_3M_2M_1\)
每个变换在前一个变换后的坐标系下:\(M_1M_2M_3M_4\)
可以参考 3b1b
题型总结
三维旋转:欧拉角、四元数、旋转矩阵、轴角之间的转换 -
总结各种变换中的符号与字母
\(^A_B\!R\) A B \(^A_B\!T\) A B SO(3):全体旋转矩阵的集合
SE(3):全体齐次变换矩阵的集合
\(\mathbb{U}\) \(\mathbb{H}\) \(\mathbb{P}\) \(S^3\)
各种表示方法的对比
最小参数表示:欧拉角(3 个) 、等效轴角(不一定算是)
表示方法
核心思想
公式
缺点
旋转矩阵 使用 3x3
\(\mathbf{R} = \begin{pmatrix} r_{11} & r_{12} & r_{13} \\ r_{21} & r_{22} & r_{23} \\ r_{31} & r_{32} & r_{33} \end{pmatrix}\) 1. 参数多(9 个) ,冗余2. 难以直观理解旋转过程3. 插值复杂
欧拉角 将旋转分解为绕三个正交轴的旋转
\((\alpha, \beta, \gamma)\) ,常用 ZYX \(\mathbf{R} = R_z(\alpha) R_y(\beta) R_x(\gamma)\) 易于理解和可视化1. 万向锁问题(奇异性)2. 不同顺序定义不唯一3. 插值不平滑
等效轴角 用一个单位轴和一个旋转角表示旋转
\((\mathbf{k}, \theta)\) ,其中 \(\mathbf{k} = (k_x, k_y, k_z)\) \(\theta\) \(\mathbf{R} = \mathbf{I} + \sin\theta \mathbf{K} + (1 - \cos\theta) \mathbf{K}^2\) , \(\mathbf{K} = \begin{pmatrix} 0 & -k_z & k_y \\ k_z & 0 & -k_x \\ -k_y & k_x & 0 \end{pmatrix}\) 1. 无法直接表示 0° 2. 插值时需注意旋转角的周期性,等效轴角在描述大范围旋转刚体的姿态时,会出现参数跳变
四元数 使用四维超复数表示旋转
\(q = \eta + i\varepsilon_1 + j\varepsilon_2 + k\varepsilon_3\) ,其中 \(\eta^2 + \varepsilon_1^2 + \varepsilon_2^2 + \varepsilon_3^2 = 1\) 参数最少(4 个)避免了奇异性问题1. 较难直观理解2. 计算稍复杂(但比旋转矩阵简单) 单位四元数与姿态是二对一关系,可以表示多圈旋转刚体
一般说来,欧拉角表示、固定角表示和等效轴角表示等姿态表示方式,适合于静止刚体或小范围旋转运动刚体。
大范围旋转刚体的姿态更适合采用旋转矩阵表示或单位四元数表示。
对于任何运动刚体,若采用旋转矩阵表示,刚体姿态是 SO(3) \(S^3\)
坐标系的变换
平移 /
要特别注意上下标的顺序 ,不要看反了
\(^A_B\!R\) A B \(^A_B\!T\) A B
不同欧拉角的考察 (z-y-x 欧拉角)
\[
\begin{align}
R_{z,y,x}(\alpha,\beta,\gamma) &= \begin{pmatrix}
\cos\alpha & -\sin\alpha & 0 \\
\sin\alpha & \cos\alpha & 0 \\
0 & 0 & 1
\end{pmatrix}
\begin{pmatrix}
\cos\beta & 0 & \sin\beta \\
0 & 1 & 0 \\
-\sin\beta & 0 & \cos\beta
\end{pmatrix}
\begin{pmatrix}
1 & 0 & 0 \\
0 & \cos\gamma & -\sin\gamma \\
0 & \sin\gamma & \cos\gamma
\end{pmatrix} \\
&= \begin{pmatrix}
\cos\alpha\cos\beta & \cos\alpha\sin\beta\sin\gamma-\sin\alpha\cos\gamma & \cos\alpha\sin\beta\cos\gamma+\sin\alpha\sin\gamma \\
\sin\alpha\cos\beta & \sin\alpha\sin\beta\sin\gamma+\cos\alpha\cos\gamma & \sin\alpha\sin\beta\cos\gamma-\cos\alpha\sin\gamma \\
-\sin\beta & \cos\beta\sin\gamma & \cos\beta\cos\gamma
\end{pmatrix}
\end{align}
\]
齐次变换矩阵的考察
\[
\begin{align}
^A_B\!T &=
\begin{bmatrix}
\begin{array}{c|c}
^A_B\!R & ^A\!O_B \\ \hline
0 & 1
\end{array}
\end{bmatrix}
\\
^B_A\!T &=
\begin{bmatrix}
\begin{array}{c|c}
^B_A\!R & ^B\!O_A \\ \hline
0 & 1
\end{array}
\end{bmatrix} =
\begin{bmatrix}
\begin{array}{c|c}
^B_A\!R & -^B_A\!R \cdot ^A\!O_B \\ \hline
0 & 1
\end{array}
\end{bmatrix}
\end{align}
\]
例子
\[
^{A}_{B}T = \begin{bmatrix} 0.25 & 0.43 & 0.86 & 5.0 \\ 0.87 & -0.50 & 0.00 & -4.0 \\ 0.43 & 0.75 & -0.50 & 3.0 \\ 0 & 0 & 0 & 1 \end{bmatrix}
\]
求:\(^{B}O_A\)
解:
\[
^{B}O_A = - \begin{bmatrix} 0.25 & 0.43 & 0.86 \\ 0.87 & -0.50 & 0.00 \\ 0.43 & 0.75 & -0.50 \end{bmatrix}^T \begin{bmatrix} 5.0 \\ -4.0 \\ 3.0 \end{bmatrix} = \begin{bmatrix} -0.25 & -0.87 & -0.43 \\ -0.43 & 0.50 & -0.75 \\ -0.86 & 0.00 & 0.50 \end{bmatrix} \begin{bmatrix} 5.0 \\ -4.0 \\ 3.0 \end{bmatrix} = \begin{bmatrix} 0.94 \\ -6.4 \\ -2.8 \end{bmatrix}
\]
左乘还是右乘
要搞清楚顺序
例 1 例 3 例 4 例 5
参考系 {A} {B}
(1) 姿态不变,原点移动到 {B} \(^{B}\boldsymbol{P}\) (2) 绕 {A} \(^{A}\boldsymbol{K}\) \(\theta_{1}\) (3) 姿态不变,原点移动,从旧原点到新原点的向量为 \(^{A}\boldsymbol{Q}\) (4) 绕 {B} \(^{B}\boldsymbol{L}\) \(\theta_{2}\)
上述变动前后 {B} {A} \(^{A}_{B}\boldsymbol{T}\) \(\boldsymbol{T}_{1}^{A} \boldsymbol{T} \boldsymbol{T}_{2}\)
\[
\boldsymbol{T}_{1}=\left[\begin{array}{cccc}
0.866 & -0.5 & 0 & -3 \\
0.433 & 0.75 & -0.5 & -3 \\
0.25 & 0.433 & 0.866 & 3 \\
0 & 0 & 0 & 1
\end{array}\right], \boldsymbol{T}_{2}=\left[\begin{array}{cccc}
0.911 & -0.244 & 0.333 & 2 \\
0.333 & 0.911 & -0.244 & -2 \\
-0.244 & 0.333 & 0.911 & 1 \\
0 & 0 & 0 & 1
\end{array}\right]
\]
试求 \(^{B}\boldsymbol{P}\) , \(^{A}\boldsymbol{K}\) , \(^{A}\boldsymbol{Q}\) , \(^{B}\boldsymbol{L}\) , \(\theta_{1}\) , \(\theta_{2}\) [0, π]) 。
解
\[
\begin{aligned}
{}^B\boldsymbol{P}&=\begin{bmatrix}2\\-2\\1\end{bmatrix}\quad {}^A\boldsymbol{Q}=\begin{bmatrix}-3\\-3\\3\end{bmatrix}\\
\theta_{1}&=\mathrm{Acos}\left(\frac{r_{11}+r_{22}+r_{33}-1}{2}\right)=\mathrm{Acos}\left(\frac{0.866+0.75+0.866-1}{2}\right)=42.18^{\circ}\\
^A\boldsymbol{K}&=\frac{1}{2\sin\theta_{1}}\begin{bmatrix}r_{32}-r_{23}\\r_{13}-r_{31}\\r_{21}-r_{12}\end{bmatrix}=\frac{1}{2\times0.6715}\begin{bmatrix}0.433+0.5\\0-0.25\\0.433+0.5\end{bmatrix}=\begin{bmatrix}0.6947\\-0.1862\\0.6947\end{bmatrix}\\
\theta_{2}&=\mathrm{Acos}\left(\frac{r_{11}+r_{22}+r_{33}-1}{2}\right)=\mathrm{Acos}\left(\frac{0.911+0.911+0.911-1}{2}\right)=30^{\circ}\\
^{B}\boldsymbol{L}&=\frac{1}{2\sin\theta_{2}}{\begin{bmatrix}r_{32}-r_{23}\\r_{13}-r_{31}\\r_{21}-r_{12}\end{bmatrix}}=\frac{1}{2\times0.5}\begin{bmatrix}0.333+0.244\\0.333+0.244\\0.333+0.244\end{bmatrix}=\begin{bmatrix}0.577\\0.577\\0.577\end{bmatrix}
\end{aligned}
\]
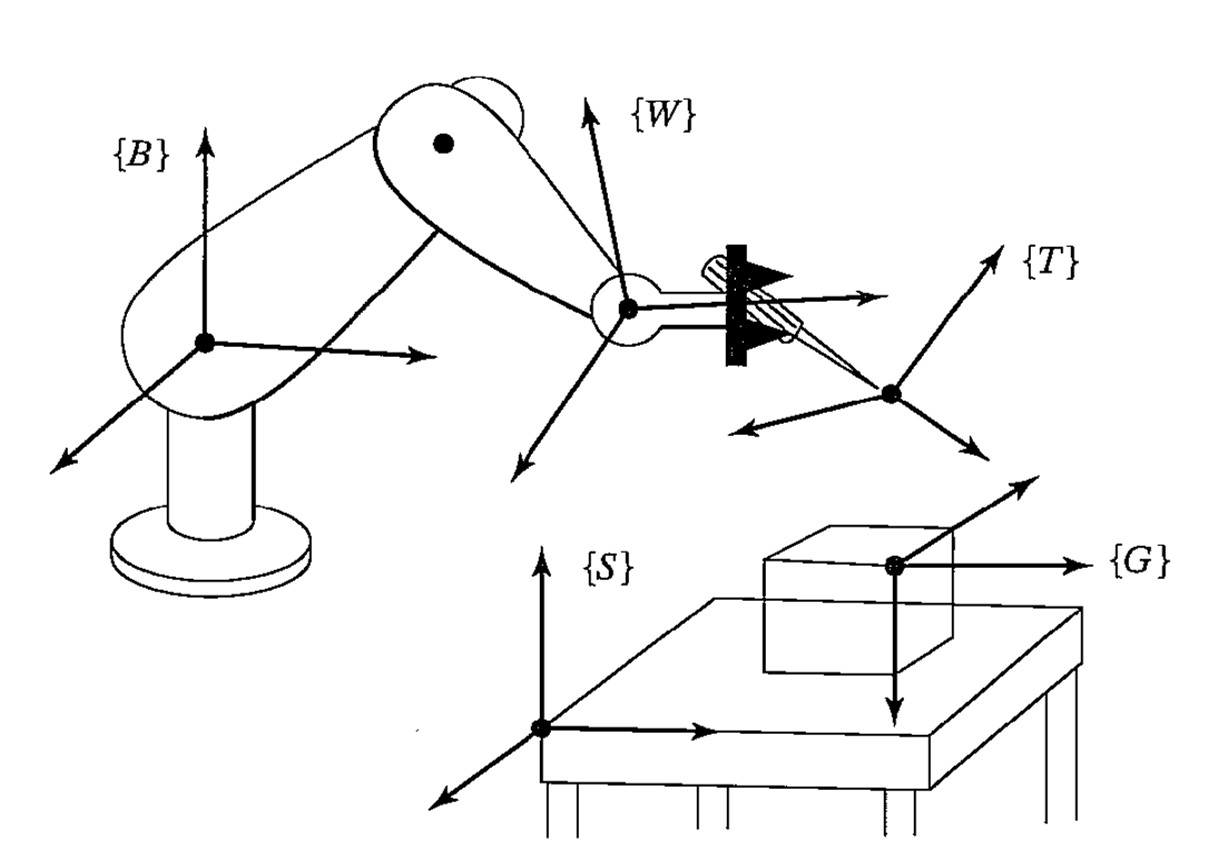
在下图中,没有确知工具的位置 \(_T^W\boldsymbol{T}\) \(^s_G\boldsymbol{T}\) ( ) ( {G}}) {T} ), \(_w^B\boldsymbol{T}\text{ 。假定已知}_S^B\boldsymbol{T}\text{ 和}_G^S\boldsymbol{T}\) , \(_T^W\boldsymbol{T}\)
\[
\begin{aligned}&\text{解:因}_I^G\boldsymbol{T}=\boldsymbol{I}\\&&_T^B\boldsymbol{T}=_S^B\boldsymbol{T}_G^S\boldsymbol{T}_T^G\boldsymbol{T}=_S^B\boldsymbol{T}_G^S\boldsymbol{T}\\&&_T^W\boldsymbol{T}=_B^W\boldsymbol{T}_T^B\boldsymbol{T}=_W^B\boldsymbol{T}^{-1B}\boldsymbol{T}_G^S\boldsymbol{T}\end{aligned}
\]
旋转矩阵与欧拉角
欧拉角 to : 直接使用矩阵乘法即可
旋转矩阵 to :使用反三角函数推导
从旋转矩阵提取欧拉角的公式跟欧拉角顺规的选取有关,因为旋转矩阵的元素会略有不同,但是思路都是一样的,就是根据旋转矩阵的解析表达式 +
这里需要特别注意,gimbal lock 所带来的特殊情况的讨论
已知 \(R \in \text{SO}(3)\) \((\alpha, \beta, \gamma) \in (-\pi, \pi] \times [-\pi/2, \pi/2] \times (-\pi, \pi]\) \(R = R_{z'y'x'}(\alpha, \beta, \gamma)\)
虽然 zyx \(\beta\)
\[
R_{z'y'x'}(\alpha, \beta, \gamma) = \begin{pmatrix}
\cos\alpha \cos\beta & \cos\alpha \sin\beta \sin\gamma - \sin\alpha \cos\gamma & \cos\alpha \sin\beta \cos\gamma + \sin\alpha \sin\gamma \\
\sin\alpha \cos\beta & \sin\alpha \sin\beta \sin\gamma + \cos\alpha \cos\gamma & \sin\alpha \sin\beta \cos\gamma - \cos\alpha \sin\gamma \\
-\sin\beta & \cos\beta \sin\gamma & \cos\beta \cos\gamma
\end{pmatrix}
\]
首先,因为 \(\beta\) \(\left[ -\frac{\pi}{2}, \frac{\pi}{2} \right]\) \(\cos\beta \ge 0\)
情况 1 \(\cos\beta > 0\)
\(\cos\beta = \sqrt{r_{32}^2 + r_{33}^2}\) \(\beta = \arctan2\left(-r_{31}, \sqrt{r_{32}^2 + r_{33}^2}\right)\) \(\alpha = \arctan2(r_{21}, r_{11})\) \(\gamma = \arctan2(r_{32}, r_{33})\)
情况 2 \(\beta = \frac{\pi}{2}\)
\[
R_{z'y'x'}(\alpha, \frac{\pi}{2}, \gamma) = \begin{pmatrix}
0 & \cos\alpha \cos\gamma - \sin\alpha \sin\gamma & \cos\alpha \sin\gamma + \sin\alpha \cos\gamma \\
0 & \sin\alpha \cos\gamma + \cos\alpha \sin\gamma & \sin\alpha \sin\gamma - \cos\alpha \cos\gamma \\
-1 & 0 & 0
\end{pmatrix}=\begin{pmatrix}
0 & -\sin(\alpha - \gamma) & \cos(\alpha - \gamma) \\
0 & \cos(\alpha - \gamma) & \sin(\alpha - \gamma) \\
-1 & 0 & 0
\end{pmatrix}
\]
只能得到一个关于 \(\alpha\) \(\gamma\) \(\alpha - \gamma = \arctan2(r_{23}, r_{22})\)
对应这种姿态的 \(z'y'x'\) \(xyz\)
情况 3 \(\beta = -\frac{\pi}{2}\)
当 \(\beta = -\frac{\pi}{2}\) \(R_{z'y'x'}(\alpha, \beta, \gamma)\)
\[
R_{z'y'x'}(\alpha, -\frac{\pi}{2}, \gamma) = \begin{pmatrix}
0 & \cos\alpha \cos\gamma + \sin\alpha \sin\gamma & -\cos\alpha \sin\gamma + \sin\alpha \cos\gamma \\
0 & \sin\alpha \cos\gamma - \cos\alpha \sin\gamma & \sin\alpha \sin\gamma + \cos\alpha \cos\gamma \\
1 & 0 & 0
\end{pmatrix}=\begin{pmatrix}
0 & \sin(\alpha + \gamma) & \cos(\alpha + \gamma) \\
0 & \cos(\alpha + \gamma) & -\sin(\alpha + \gamma) \\
1 & 0 & 0
\end{pmatrix}
\]
\(\alpha + \gamma = \arctan2(-r_{23}, r_{22})\)
旋转矩阵与四元数
对任何的单位四元数 \(\eta+\) i\(\varepsilon_1+\) j\(\varepsilon_2+\) \(k\varepsilon_3,\boldsymbol{R}_\varepsilon(\eta)\)
对任何的旋转矩阵 \(R\) , \(\pm ( \eta +\) i\(\varepsilon _1+\) j\(\varepsilon _2+\) k\(\varepsilon _3)\) \(R=\boldsymbol{R}_\varepsilon(\eta)\)
四元数 to
可以直接带入公式,对于四元数 \(p = \eta + \varepsilon_1 i + \varepsilon_2 j + \varepsilon_3 k\) ,
\[
A_B^B R = R_\varepsilon(\eta) = \begin{bmatrix}
2(\eta^2 + \varepsilon_1^2) - 1 & 2(\varepsilon_1 \varepsilon_2 - \eta \varepsilon_3) & 2(\varepsilon_1 \varepsilon_3 + \eta \varepsilon_2) \\
2(\varepsilon_1 \varepsilon_2 + \eta \varepsilon_3) & 2(\eta^2 + \varepsilon_2^2) - 1 & 2(\varepsilon_2 \varepsilon_3 - \eta \varepsilon_1) \\
2(\varepsilon_1 \varepsilon_3 - \eta \varepsilon_2) & 2(\varepsilon_2 \varepsilon_3 + \eta \varepsilon_1) & 2(\eta^2 + \varepsilon_3^2) - 1
\end{bmatrix}
\]
姿态的单位四元数表示
假设被旋转的变量为 \(V\) ,
\[
V' = p V p^{-1}
\]
旋转矩阵 to
首先判断旋转矩阵的合法性,判断其是否正交,即 \(R \cdot R^T = I\)
然后可以从对应的旋转矩阵的表达式中,使用拼凑法,凑出所需要的四个参数的值。这里需要注意的是,每一个旋转矩阵会对应两个反号的四元数
欧拉参数解算
已知 \(R \in SO(3)\)
\[
R = \begin{bmatrix}
r_{11} & r_{12} & r_{13} \\
r_{21} & r_{22} & r_{23} \\
r_{31} & r_{32} & r_{33}
\end{bmatrix} = \begin{bmatrix}
2(\eta^2 + \varepsilon_1^2) - 1 & 2(\varepsilon_1 \varepsilon_2 - \eta \varepsilon_3) & 2(\varepsilon_1 \varepsilon_3 + \eta \varepsilon_2) \\
2(\varepsilon_1 \varepsilon_2 + \eta \varepsilon_3) & 2(\eta^2 + \varepsilon_2^2) - 1 & 2(\varepsilon_2 \varepsilon_3 - \eta \varepsilon_1) \\
2(\varepsilon_1 \varepsilon_3 - \eta \varepsilon_2) & 2(\varepsilon_2 \varepsilon_3 + \eta \varepsilon_1) & 2(\eta^2 + \varepsilon_3^2) - 1
\end{bmatrix}
\]
若 \(r_{11} + r_{22} + r_{33} > -1\) 若 \(r_{11} + r_{22} + r_{33} = -1\) \(\theta = 2k\pi\)
说明 \(\eta > 0\)
\[
\sqrt{r_{11} + r_{22} + r_{33} + 1} = 2|\eta|
\sqrt{r_{11} - r_{22} - r_{33} + 1} = 2|\varepsilon_1|, \text{sgn}(r_{32} - r_{23}) = \text{sgn}(2\eta\varepsilon_1)
\]
这个时候因为 \(\eta > 0\) , \(\eta\varepsilon_1\) \(\varepsilon_1\)
\[
\begin{bmatrix}
\eta \\
\varepsilon
\end{bmatrix} = \frac{1}{2} \begin{bmatrix}
\sqrt{r_{11} + r_{22} + r_{33} + 1} \\
\text{sgn}(r_{32} - r_{23}) \sqrt{r_{11} - r_{22} - r_{33} + 1} \\
\text{sgn}(r_{13} - r_{31}) \sqrt{r_{22} - r_{33} - r_{11} + 1} \\
\text{sgn}(r_{21} - r_{12}) \sqrt{r_{33} - r_{11} - r_{22} + 1}
\end{bmatrix}
\]
或
\[
\begin{bmatrix}
\eta \\
\varepsilon
\end{bmatrix} = -\frac{1}{2} \begin{bmatrix}
\sqrt{r_{11} + r_{22} + r_{33} + 1} \\
\text{sgn}(r_{32} - r_{23}) \sqrt{r_{11} - r_{22} - r_{33} + 1} \\
\text{sgn}(r_{13} - r_{31}) \sqrt{r_{22} - r_{33} - r_{11} + 1} \\
\text{sgn}(r_{21} - r_{12}) \sqrt{r_{33} - r_{11} - r_{22} + 1}
\end{bmatrix}
\]
这个时候 \(\eta\) 0
又可知 \(r_{11}\) \(r_{22}\) \(r_{33}\) \(-1\) \(\varepsilon\) 0
以 \(r_{11} \neq -1\) (\(\varepsilon_1 \neq 0\) )
\[
\begin{bmatrix}
\eta \\
\varepsilon
\end{bmatrix} = \frac{1}{2} \begin{bmatrix}
0 \\
\sqrt{r_{11} - r_{22} - r_{33} + 1} \\
\text{sgn}(r_{12}) \sqrt{r_{22} - r_{33} - r_{11} + 1} \\
\text{sgn}(r_{13}) \sqrt{r_{33} - r_{11} - r_{22} + 1}
\end{bmatrix}
\]
或
\[
\begin{bmatrix}
\eta \\
\varepsilon
\end{bmatrix} = -\frac{1}{2} \begin{bmatrix}
0 \\
\sqrt{r_{11} - r_{22} - r_{33} + 1} \\
\text{sgn}(r_{12}) \sqrt{r_{22} - r_{33} - r_{11} + 1} \\
\text{sgn}(r_{13}) \sqrt{r_{33} - r_{11} - r_{22} + 1}
\end{bmatrix}
\]
这里要注意一下,求出来 \(\varepsilon_1<0\) \(\varepsilon_2\) \(sgn(r_{12})\) \(\varepsilon_2\) \(\sgn(r_{12})\)
\[
\begin{bmatrix}
\eta \\
\varepsilon
\end{bmatrix} = \begin{bmatrix}
\pm 1 \\
0 \\
0 \\
0
\end{bmatrix}
\]
当 \(\theta = 2k\pi\) \(\sin \frac{\theta}{2} = 0\) \(\varepsilon\)
这意味着当旋转角 \(\theta\) \(2k\pi\) \(k\) \(\varepsilon\) \(\eta\) \(\pm 1\) \(R\)
这里就可以说明欧拉参数以及四元数解决了等效轴角的问题
欧拉角与四元数
欧拉角 to
首先欧拉角可以视为绕着给定轴旋转一个角度
我们又知道四元数是可以相乘的
所以把欧拉角的旋转描述成四元数,再进行相乘即可
四元数 to 比较复杂,建议使用四元数转换为旋转矩阵,再转换为欧拉角
等效轴角
等效轴角 to
等效轴角就是绕着某条单位轴旋转一定角度,这个角度和四元数非常类似,所以这两个转换比较容易
四元数可以表示为
\[
p = \eta + \varepsilon_1 i + \varepsilon_2 j + \varepsilon_3 k
\]
\[
\eta = \cos \frac{\theta}{2}, \quad \varepsilon = \begin{bmatrix} \varepsilon_1 \\ \varepsilon_2 \\ \varepsilon_3 \end{bmatrix} = \begin{bmatrix} k_x \sin \frac{\theta}{2} \\ k_y \sin \frac{\theta}{2} \\ k_z \sin \frac{\theta}{2} \end{bmatrix}
\]
等效轴角 to :罗德里格斯旋转公式 |Rodrigues' rotation formula
矩阵形式 :两种等价表达
\[
\begin{align*}
R &= I + \sin(\theta)N + (1 - \cos(\theta))N^2\\
R &= \cos(\theta)\ast I + (1-\cos(\theta)) \ast n \ast n^T + \sin(\theta) \ast n
\end{align*}
\]
其中 , \(n = \begin{pmatrix}n_x \\ n_y \\ n_z\end{pmatrix}\) \(N\)
\[
N = \begin{bmatrix}
0 & -n_z & n_y \\
n_z & 0 & -n_x \\
-n_y & n_x & 0
\end{bmatrix}
\]
也可以记忆公式
\[
R= \begin{pmatrix}k_x^2 \nu \theta + c \theta & k_x k_y \nu \theta - k_z s \theta & k_x k_z \nu \theta + k_y s \theta \\ k_x k_y \nu \theta + k_z s \theta & k_y^2 \nu \theta + c \theta & k_y k_z \nu \theta - k_x s \theta \\ k_x k_z \nu \theta - k_y s \theta & k_y k_z \nu \theta + k_x s \theta & k_z^2 \nu \theta + c \theta\end{pmatrix}
\]
旋转矩阵 to
正方向旋转,等效于负方向逆时针旋转
求解
已知 \(R \in \mathrm{SO}(3)\) \((k_x, k_y, k_z)^\mathrm{T}\) \(\theta \in (-\pi, \pi]\) \(R = R_K(\theta)\)
\[
R = \begin{pmatrix}
r_{11} & r_{12} & r_{13} \\
r_{21} & r_{22} & r_{23} \\
r_{31} & r_{32} & r_{33}
\end{pmatrix} = \begin{pmatrix}
k_x^2 \nu \theta + c \theta & k_x k_y \nu \theta - k_z s \theta & k_x k_z \nu \theta + k_y s \theta \\
k_x k_y \nu \theta + k_z s \theta & k_y^2 \nu \theta + c \theta & k_y k_z \nu \theta - k_x s \theta \\
k_x k_z \nu \theta - k_y s \theta & k_y k_z \nu \theta + k_x s \theta & k_z^2 \nu \theta + c \theta
\end{pmatrix} \quad \nu \theta = 1 - c \theta
\]
不难理解 \(R_K(\theta) = R_{-K}(-\theta)\)
因此规定 \(\theta \in [0, \pi]\)
\[
\theta = \arccos\left(\frac{r_{11} + r_{22} + r_{33} - 1}{2}\right)
\]